


2021年9月28日,我院李彬教授承担的山东省重点研发计划(公益类)项目“基于复杂环境动态交互的机器人智能自主稳定行走关键技术研究”项目(编号:2018GGX103054)顺利通过验收。
该项目自2018年立项以来,项目团队成员攻克难关,在项目主持单位齐鲁工业大学和合作单位山东大学机器人研究中心的共同努力下,在理论研究和机器人系统集成上取得了一定的突破,研制了具有高动态性、机构仿生、运动仿生、能够以动步态连续稳定行走,具有一定抗冲击、越障能力和较强复杂环境智能自主运动的四足机器人样机(如图所示)。
学术成果上,发表相关学术论文16篇,申请发明专利13项、授权发明专利10项,申请软件著作权4项,培养硕士生3名,相关专利进行了成果转化,取得了一定的经济社会效益。
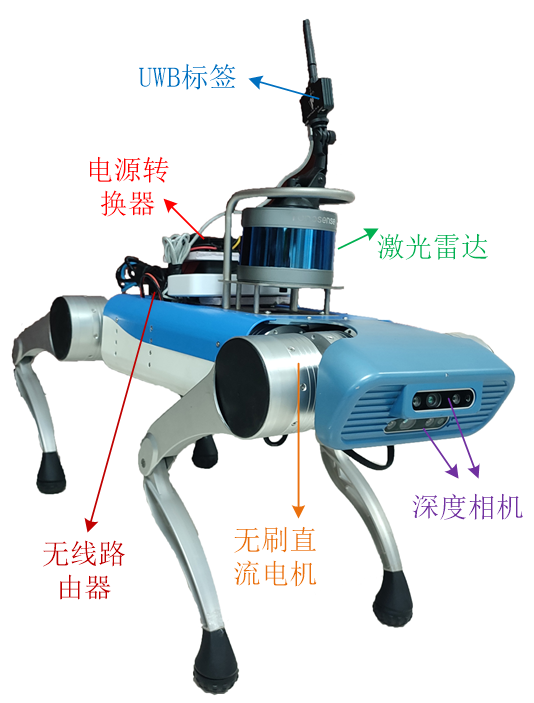
本项目研制的四足机器人平台
